[CV] 카메라 캘리브레이션 & 카메라 파라미터 | 2D 이미지와 3D 월드 간의 관계를 모델링하는 방법
카메라 캘리브레이션 (Camera Calibration)
카메라 캘리브레이션(camera calibration)은 카메라의 물리적 특성을 이해하고, 이를 통해 3D 공간에서의 물체의 위치나 형태를 정확하게 추정하기 위한 과정이에요. 이 과정은 카메라가 찍은 2D 이미지와 실제 3D 월드 간의 관계를 정확하게 모델링하고, 이미지에서 왜곡된 부분을 보정하는 데 중요한 역할을 합니다.
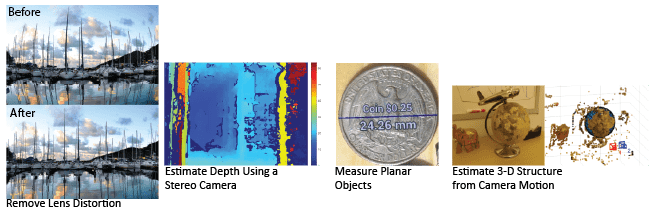
카메라 캘리브레이션의 주요 과정은 내부 파라미터와 외부 파라미터를 추정하는 것인데, 이러한 파라미터를 사용하면 렌즈 왜곡을 수정하고 카메라 위치를 추정할 수 있어요.
1. 카메라 내부 파라미터 (Intrinsic camera parameters)
1.1. 초점 거리(focal length)
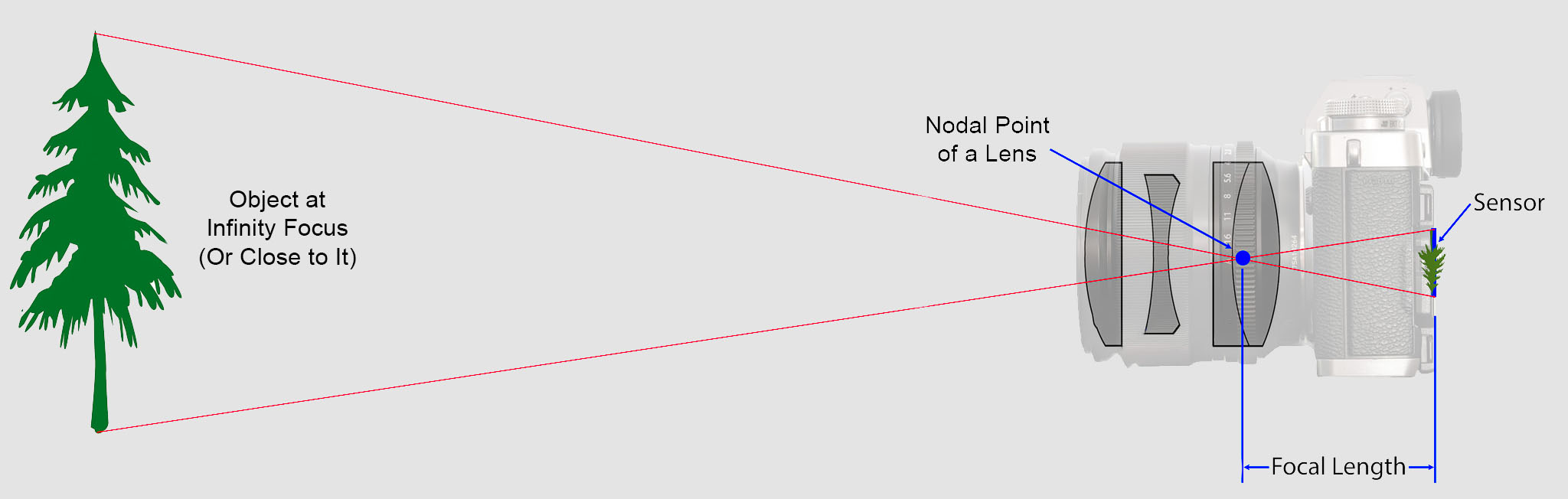
- 카메라 렌즈의 초점 거리로, 이미지 센서(CCD, CMOS 등)와 렌즈 사이의 거리
- 카메라 모델에서 초점거리(f)는 픽셀 단위로 표현(영상에서의 기하학적 해석을 용이하게 하기 위함)
- 주로 fx, fy로 표현
- fx,fy가 따로 있는 이유는 이미지 센서의 물리적인 셀 간격이 가로 방향과 세로 방향이 서로 다를 수 있기 때문
1.2. 주점(principal point)
- 이미지 센서의 중심점으로, 보통 이미지의 중심과 일치함
- 카메라 렌즈의 중심에서 이미지 센서에 내린 수선의 발의 영상 좌표
- 영상 중심점과는 다른 의미 (카메라 조립과정에서 렌즈와 이미지 센서가 수평이 어긋날 수 있기 때문)
- 주로 cx, cy로 표현
1.3. 왜곡 계수(distortion coefficients)
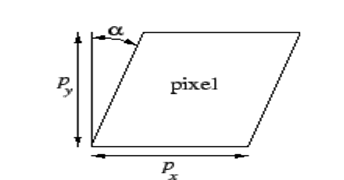
- 렌즈 왜곡으로 인한 이미지 왜곡을 나타내는 파라미터
- 일반적으로 방사 왜곡(radial distortion)과 접선 왜곡(tangential distortion)으로 나눌 수 있음
- 요즘 카메라들은 이러한 skew 에러가 거의 없기 때문에 카메라 모델에서 보통 비대칭 계수까지 고려하지는 않음
- skew_c = tana
2. 카메라 외부 파라미터 (Extrinsic camera parameters)
외부 파라미터는 카메라의 위치와 방향을 3D 공간에서 정의하며, 주로 회전 행렬과 이동 벡터로 구성돼요. 이 파라미터들은 월드 좌표계에서 카메라 좌표계로의 변환을 표현할 수 있죠. 또한 카메라 외부 파라미터는 카메라의 위치와 방향(6-DoF)에 따라 달라지고 월드 좌표계를 어떻게 정의했는지에 따라서도 달라질 수 있어요.
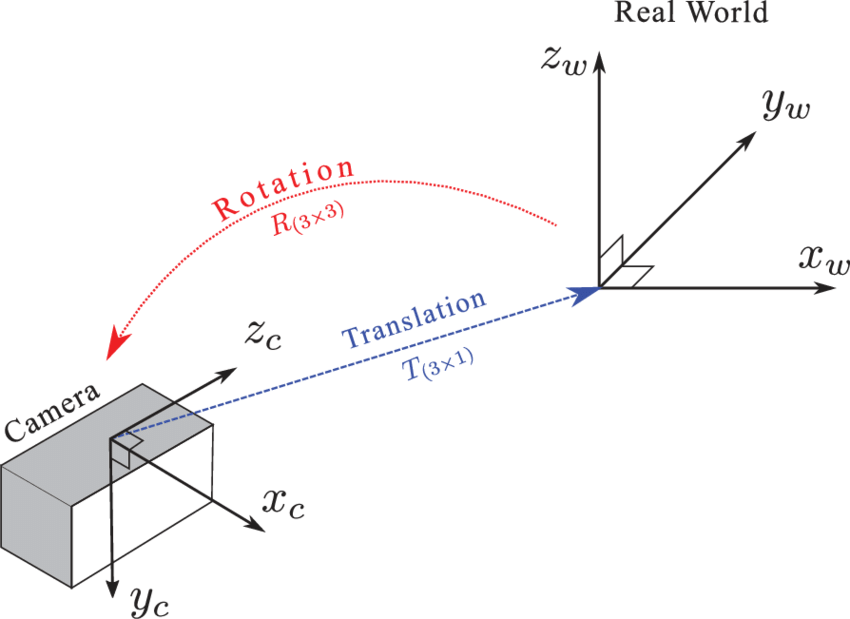
2.1. 회전 행렬(Rotation matrix)
- 회전 행렬은 카메라의 회전 상태를 나타내며, 월드 좌표계에서 카메라 좌표계로 3D 공간을 회전시키는 역할
- 3x3 크기의 행렬로 표현되며, 이를 통해 카메라가 월드 좌표계에서 어떻게 회전되어 있는지를 알 수 있음
2.2. 이동 벡터(Translation vector)
- 이동 벡터는 카메라의 위치를 나타내며, 월드 좌표계에서 카메라 좌표계로의 평행 이동을 설명
- 3D 공간에서 카메라의 원점을 특정 위치로 이동시키는 역할
2.3. 외부 파라미터의 활용
2.3.1. 월드 좌표계에서 카메라 좌표계로의 변환
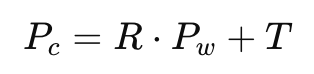
- 월드 좌표계에서 주어진 3D 점 Pw를 카메라 좌표계로 변환하려면, 외부 파라미터를 사용하여 위와 같이 계산할 수 있음
- Pc는 카메라 좌표계에서의 포인트 위치임
2.3.2. 카메라 좌표계에서 이미지 평면으로의 투영
- 변환된 점 Pc를 이미지 평면으로 투영하려면, 내부 파라미터를 적용
- 이 과정은 카메라 모델의 핵심이며, 외부 파라미터가 이 과정의 첫 번째 단계에서 중요한 역할을 수행
3. 카메라 파라미터를 추정하는 방법
3.1. 대응점 추출
카메라 파라미터를 추정하기 위해서는, 3D 공간의 점들과 이 점들이 2D 이미지에서 어떻게 보이는지를 나타내는 대응점이 필요해요. 이러한 대응점을 얻기 위해 다음과 같은 방법들이 사용될 수 있어요.
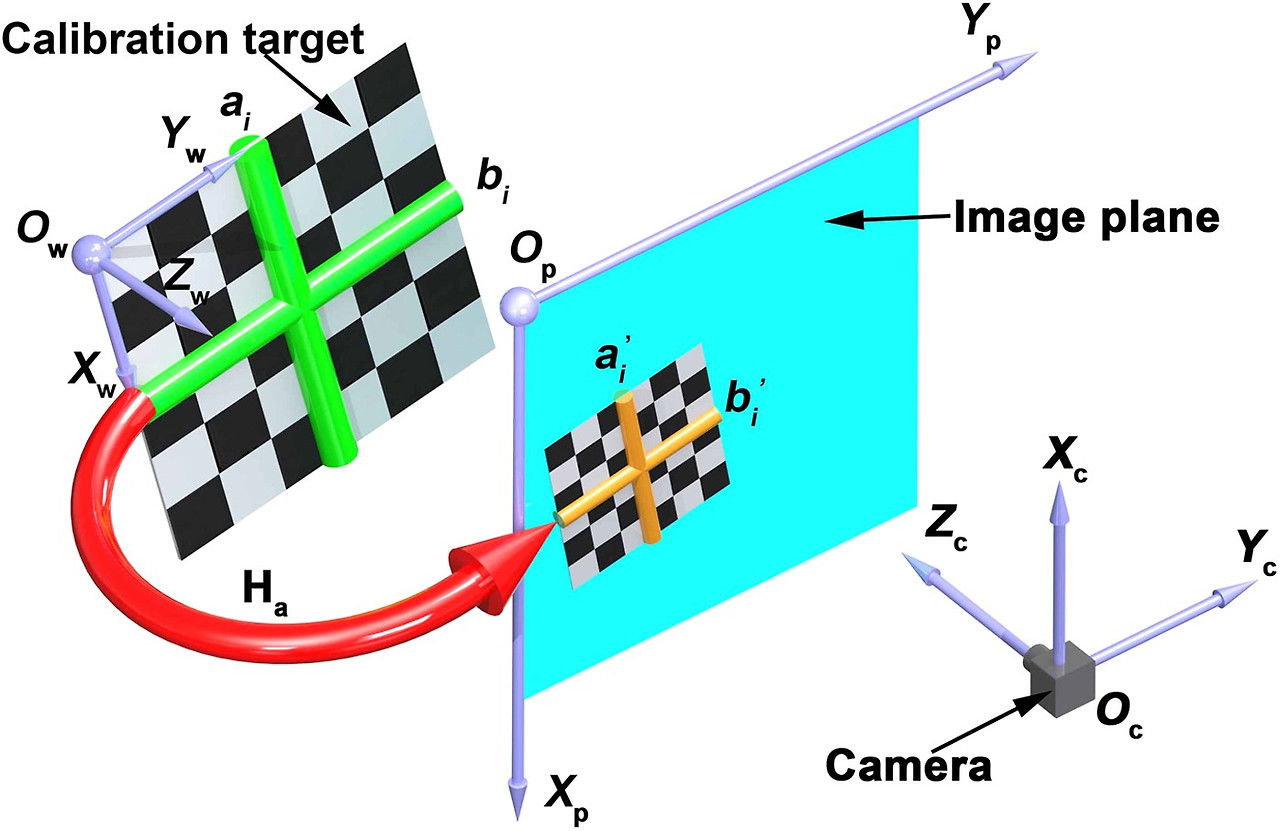
- 캘리브레이션 패턴 활용: 체커보드나 원형 그리드와 같은 캘리브레이션 패턴을 사용하여, 그 패턴의 3D 좌표와 2D 이미지에서의 좌표 간의 대응을 추출
- 특징점 매칭: 이미지에서 추출한 특징점들(예: 코너, 에지 등)을 3D 모델이나 다른 이미지의 특징점들과 매칭하여 대응점을 추출
- 자연 환경 활용
- 캘리브레이션 패턴 없이, 주변 환경의 3D 구조와 이미지에서의 위치를 기반으로 대응점을 추출할 수도 있음
- 이 경우, 사전에 환경의 3D 모델이 필요하거나 SLAM (Simultaneous Localization and Mapping)과 같은 기법이 필요
3.2. 파라미터 추정
대응점들을 얻은 후, 카메라의 내부 및 외부 파라미터를 추정하기 위해 비선형 최적화 방법이 사용되는데요. 이 과정은 다음과 같아요.
- 핀홀 카메라 모델 적용: 대응점들을 통해 카메라의 기본 투영 모델(핀홀 모델)을 적용하여 3D 좌표가 2D 이미지로 어떻게 투영되는지를 수학적으로 모델링
- 최적화 알고리즘 사용
- 파라미터 추정은 보통 Levenberg-Marquardt 같은 비선형 최적화 알고리즘을 사용하여 수행됨
- 이 알고리즘은 모델이 예측한 2D 위치와 실제 2D 이미지에서 측정된 위치 간의 오차를 최소화하는 방향으로 파라미터를 조정
3.3. 왜곡 보정
카메라 렌즈의 왜곡으로 인해 이미지가 왜곡될 수 있는데요. 추정된 왜곡 계수를 사용하여 이미지를 보정하여 실제 3D 구조와 일치하는 조금 더 정확한 2D 이미지를 얻을 수 있어요.
[카메라 파라미터 활용 예시]
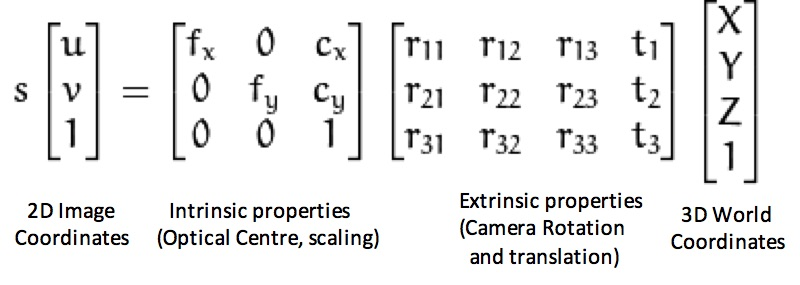
카메라 파라미터들을 추정하기 위해서는 3D 월드 좌표와 그에 대응하는 2D 영상 좌표가 있어야 한다고 말씀드렸죠? 체커보드와 같이 캘리브레이션 패턴을 나타내는 여러 영상을 사용하여 이러한 대응점을 얻을 수 있고, 대응점을 사용하여 카메라 파라미터를 구할 수 있어요. 카메라 영상은 3D 공간상의 점들을 2D 이미지 평면에 프로젝션하여 얻어지고, 핀홀 카메라 모델에서 이러한 변환 관계는 아래와 같이 모델링돼요
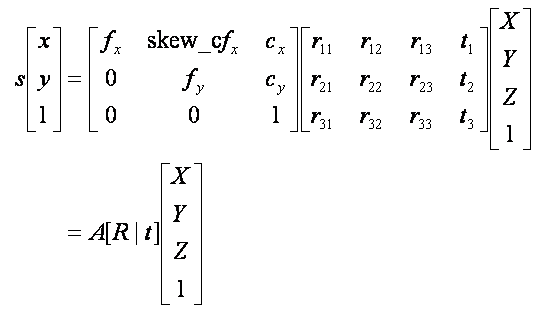
- X, Y, Z : 월드 좌표계 상의 3D 점
- [R|t] : 월드 좌표계를 카메라 좌표계로 변환시키기 위한 회전/이동 변환 행렬 - Extrinsic camera parameters
- A : 카메라 내부 파라미터 행렬 - Intrinsic camera parameters
* A와 [R|t]를 합쳐 camera matrix 또는 projection matrix 라 부름
3. 카메라 캘리브레이션 예제 코드
import numpy as np
import cv2 as cv
import glob
# 종료 조건 설정: epsilon 또는 최대 반복 횟수(30)에 도달하면 알고리즘을 종료
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 체커보드의 3D 공간 상의 좌표 준비
# 예: (0,0,0), (1,0,0), (2,0,0), ..., (6,5,0)
objp = np.zeros((6*7, 3), np.float32)
objp[:, :2] = np.mgrid[0:7, 0:6].T.reshape(-1, 2)
# 모든 이미지에서 객체 좌표와 이미지 좌표를 저장할 배열
objpoints = [] # 실제 3D 공간에서의 점들
imgpoints = [] # 이미지 평면에서의 2D 점들
# 현재 디렉토리에 있는 모든 jpg 이미지를 가져옴
images = glob.glob('*.jpg')
# 각 이미지를 순회하면서 처리
for fname in images:
# 이미지를 읽고 그레이스케일로 변환
img = cv.imread(fname)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 체커보드 코너를 찾음
ret, corners = cv.findChessboardCorners(gray, (7, 6), None)
# 코너를 찾았다면, 객체 좌표와 이미지 좌표를 추가
if ret == True:
objpoints.append(objp) # 객체 좌표 추가
# 코너 위치를 더 정밀하게 조정
corners2 = cv.cornerSubPix(gray, corners, (11,11), (-1,-1), criteria)
imgpoints.append(corners2) # 이미지 좌표 추가
# 체커보드 코너를 이미지에 그려서 표시
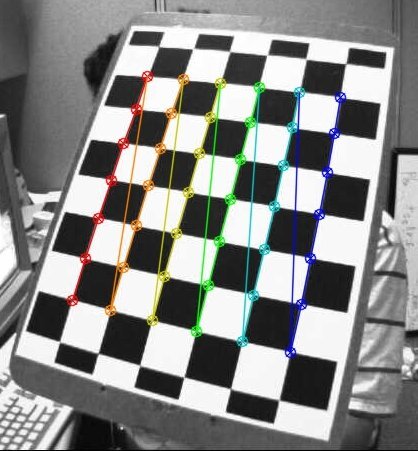
cv.drawChessboardCorners(img, (7, 6), corners2, ret)
cv.imshow('img', img) # 이미지를 창에 표시
cv.waitKey(1000) # 1초 동안 대기
cv.destroyAllWindows() # 모든 창 닫기
# 카메라 캘리브레이션 수행
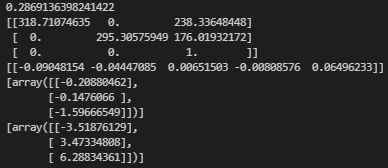
ret, mtx, dist, rvecs, tvecs = cv.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
# 결과 출력
print(ret, mtx, dist, rvecs, tvecs, sep='\n')
- criteria 설정
- criteria는 코너 감지 알고리즘에서 사용할 종료 조건
- 여기서는 최대 30번 반복하거나 정확도가 0.001 이하로 낮아지면 종료
- 체커보드의 3D 좌표 생성
- objp는 체커보드의 각 교차점의 3D 좌표를 나타냄
- Z값은 모두 0으로 설정되어 있으며, 7x6 체커보드의 평면 좌표를 정의
- 이미지에서 체커보드 코너 감지
- cv.findChessboardCorners를 사용하여 각 이미지에서 체커보드 코너를 검출
- 코너가 발견되면 해당 코너의 위치를 정밀하게 조정하여 corners2에 저장
- 코너를 찾은 경우 처리
- objpoints 리스트에는 3D 객체 점(실제 좌표)을 추가하고
- imgpoints 리스트에는 해당 점에 대응하는 이미지 평면의 2D 좌표를 추가
- 코너를 이미지에 표시
- cv.drawChessboardCorners를 사용하여 감지된 코너를 이미지 위에 그림
- 카메라 캘리브레이션 수행
- cv.calibrateCamera 함수는 모은 3D 객체 좌표와 2D 이미지 좌표를 사용하여 카메라의 내부 파라미터와 왜곡 계수(dist), 각 이미지에 대한 회전 벡터(rvecs)와 변환 벡터(tvecs)를 계산
- 결과 출력
- 마지막으로, 추정된 파라미터들이 출력됨
- ret은 최적화 결과의 재투영 오류를 나타내며, mtx는 카메라 매트릭스, dist는 왜곡 계수, rvecs는 회전 벡터, tvecs는 변환 벡터를 표현
카메라 캘리브레이션과 파라미터 추정은 컴퓨터 비전에서 필수적인 과정으로, 정확한 3D 정보를 얻고 왜곡을 보정하는 데 중요한 역할을 해요. 이번 포스팅에서 소개한 내용을 바탕으로, 여러분도 자신의 카메라를 정확히 설정하여 다양한 비전 애플리케이션에 활용해 보시길 바랍니다. 이해가 어렵다면 실습을 통해 직접 경험해보는 것도 좋은 방법이에요! 저도 그랬으니까요 😢