Computer Vision 업무를 하다보면 3D 데이터도 자주 다루게 된다. 현실 세계를 디지털 공간에 재현하려면 3D 데이터를 저장하고 활용하는 방식에 대한 이해가 필수적이다. 최근에는 자율주행, 로보틱스, AR/VR, 3D 재구성, 의료 등 다양한 분야에서 3D 데이터가 활용되고 있다.
3D 데이터는 저장 방식에 따라 Mesh, Point Cloud, Voxel 등으로 나눌 수 있고, 각 데이터 구조를 저장하기 위해 PLY, PCD, OBJ 같은 다양한 파일 포맷이 존재한다. 각각의 포맷은 특정한 용도와 장점이 있기 때문에, 프로젝트의 목표에 따라 적절한 데이터를 선택하는 것이 중요하다.
이 글에서는 3D 데이터의 주요 구조와 포맷을 정리해 보고자 한다.
📌 3D 데이터 구조
1. Mesh

📍 특징
- 3D 공간에서 정점(Vertex)과 면(Face)의 연결을 기반으로 모델을 표현한다.
- 법선(Normal), 텍스처(Texture), UV 좌표 등의 추가 정보를 포함할 수 있다.
- 렌더링, 게임 그래픽, 3D 모델링에서 많이 사용된다.
📍 대표적인 파일 포맷
| 포맷 | 특징 |
| OBJ (+MTL) | 거의 모든 3D 소프트웨어에서 지원, 텍스처 포함 가능 |
| FBX | Autodesk 포맷, 애니메이션 포함 가능 |
| GLTF/GLB | WebXR 및 AR/VR에서 많이 사용, 압축률이 좋음 |
| STL | 3D 프린팅에 많이 사용, 텍스처 정보 없음 |
| PLY | 메시와 점군을 저장 가능, 다양한 속성 포함 가능 |
2. Point Cloud

📍 특징
- 3D 공간에서 좌표(x, y, z)와 컬러(RGB, Intensity) 정보를 저장하는 방식이다.
- LiDAR 센서, Structure from Motion(SfM), 3D 스캐닝에서 생성된 데이터를 저장하는 데 사용된다.
- 메시보다 구조가 단순하고 데이터가 크지만, 딥러닝과 3D 분석에 유리하다.
📍 대표적인 파일 포맷
| 포맷 | 특징 |
| PCD | PCL(Point Cloud Library)에서 최적화됨 |
| PLY | 컬러 및 법선 정보를 저장할 수 있어 점군과 메시 저장 가능 |
| LAS/LAZ | LiDAR 데이터 저장용 (LAZ는 압축 버전) |
| XYZ | 단순한 (x, y, z) 좌표 리스트, 컬러 정보 없음 |
🔄 3D 데이터 변환: Mesh ↔ Point Cloud
3D 데이터를 다루다 보면 Mesh와 Point Cloud 사이의 변환이 자주 필요하다. 각 데이터 구조가 가진 특성이 다르기 때문에, 목적에 맞게 변환하면 더욱 효과적으로 활용할 수 있다.
포인트 클라우드를 메시로 변환하는 이유는 주로 렌더링과 3D 모델링 때문이다. 포인트 클라우드는 점들의 모음이라 직접 렌더링하면 비어 보일 수 있다. 따라서 Triangulation 과정을 통해 점들을 연결해 면(Face)을 형성하면, 게임, AR/VR, 3D 프린팅 등의 응용에서 더 적절하게 사용할 수 있다. 이 과정에서는 Poisson Surface Reconstruction이나 Ball Pivoting Algorithm과 같은 방법이 주로 사용되며, MeshLab에서는 `Surface Reconstruction` 기능을 이용해 쉽게 변환할 수 있다. 또한, CloudCompare에서도 `Poisson Reconstruction`을 활용해 포인트 클라우드를 메시로 변환할 수 있다.
반대로, 메시를 포인트 클라우드로 변환하는 이유는 주로 3D 딥러닝과 LiDAR 시뮬레이션 때문이다. 메시 데이터는 면으로 이루어져 있지만, 딥러닝 모델(PointNet 등)은 메시보다 포인트 클라우드를 입력으로 사용한다. 따라서 메시 표면에서 일정한 간격으로 점을 샘플링하는 방식을 사용해 포인트 클라우드로 변환한다. 이를 위해 Uniform Sampling이나 Poisson Disk Sampling과 같은 방법이 사용되며, MeshLab에서는 `Poisson-disk Sampling` 기능을 이용해 메시를 포인트 클라우드로 변환할 수 있다. CloudCompare에서도 `Mesh to Cloud` 기능을 통해 메시를 포인트 클라우드로 변환할 수 있다.
이러한 변환 과정은 CG, AR/VR, 자율주행, 3D 프린팅, 인공지능 연구 등 다양한 곳에서 필수적으로 활용된다. 따라서 어떤 데이터 구조가 필요한지에 따라 변환이 필요하다는 점을 이해하는 것이 중요하다.
3. Voxel

📍 특징
- 3D 공간을 Voxel(3D 픽셀) 단위로 표현하는 방식이다.
- CT, MRI 같은 의료 영상 데이터나 3D 딥러닝 연구에서 많이 사용된다.
- 메시나 점군과 달리 내부 구조까지 표현할 수 있다.
📍 대표적인 파일 포맷
| 포맷 | 특징 |
| VDB (OpenVDB) | Sparse Voxel 저장, CG 및 시뮬레이션에서 사용 |
| NII (NIfTI) | 의료 영상 (MRI, CT) 데이터 포맷 |
| MRC | Cryo-EM 데이터에 사용 |
📌 3D 데이터 포맷
1. PLY (Polygon File Format, Stanford PLY)
📍 특징
- Point Cloud와 Mesh 데이터를 저장할 수 있다.
- ASCII 및 바이너리 형식을 모두 지원하지만, 일반적으로 바이너리 형태를 사용.
- 각 점마다 RGB 컬러, 법선(normal), 투명도(alpha), 반사율 등 다양한 속성을 저장할 수 있다.
📍 주로 사용하는 경우
- 점군(Point Cloud) 데이터 저장
- 3D Reconstruction 결과 저장
- Open3D, MeshLab 등의 툴에서 사용
*바이너리는 파일 크기를 줄이고 처리 속도를 높이는데 유리하다.
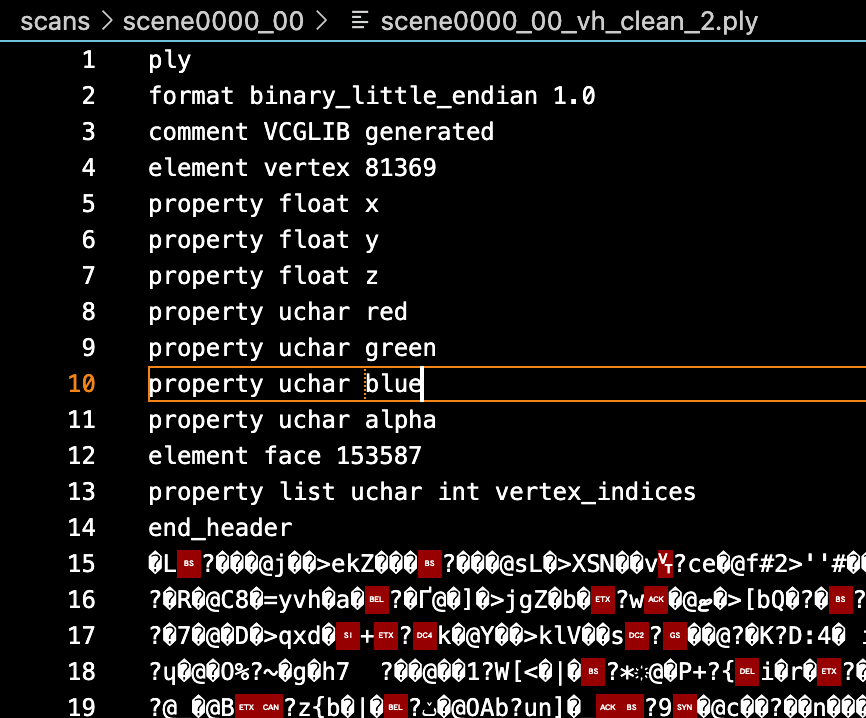
위 예시처럼 ply 포맷 파일을 텍스트 편집기로 보면 end_header 아래로는 바이너리라서 알아 볼 수 없음
→ 때문에 아래 코드와 같이 open3d를 이용해서 파일을 읽고 프로세싱하면 됨
import open3d as o3d
import numpy as np
# 파일 경로 지정
file_path = 'scans/scene0000_00/scene0000_00_vh_clean_2.ply'
# 1. 포인트 클라우드로 읽기
print("=== 포인트 클라우드 정보 ===")
pcd = o3d.io.read_point_cloud(file_path)
points = np.asarray(pcd.points)
# 포인트 클라우드 기본 특성
print(f"포인트 수: {len(pcd.points)}")
print(f"포인트 차원: {np.asarray(pcd.points).shape}")
print(f"컬러 데이터 존재 여부: {pcd.has_colors()}")
if pcd.has_colors():
print(f"컬러 데이터 shape: {np.asarray(pcd.colors).shape}")
print(f"노멀 벡터 존재 여부: {pcd.has_normals()}")
if pcd.has_normals():
print(f"노멀 벡터 shape: {np.asarray(pcd.normals).shape}")
# 2. 메시로 읽기
print("\n=== 메시 정보 ===")
mesh = o3d.io.read_triangle_mesh(file_path)
# 메시 기본 특성
print(f"정점 수: {len(mesh.vertices)}")
print(f"삼각형 면 수: {len(mesh.triangles)}")
print(f"정점 노멀 존재 여부: {mesh.has_vertex_normals()}")
print(f"정점 컬러 존재 여부: {mesh.has_vertex_colors()}")
print(f"삼각형 노멀 존재 여부: {mesh.has_triangle_normals()}")
# 3. 시각화 (필요한 경우)
o3d.visualization.draw_geometries([pcd]) # 포인트 클라우드 시각화
o3d.visualization.draw_geometries([mesh]) # 메시 시각화
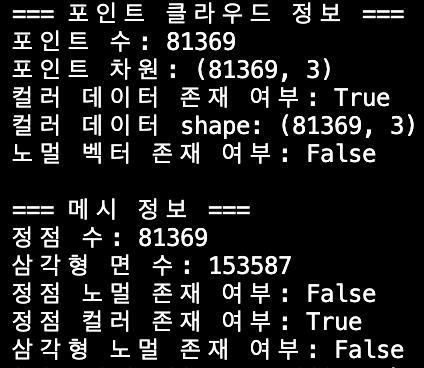
- ply 파일을 point cloud 또는 mesh 구조로 읽을 수 있음
- point cloud는 points, colors, normals와 같은 값들이 존재
- mesh는 vertices, triangles, vertex_colors와 같은 값들이 존재
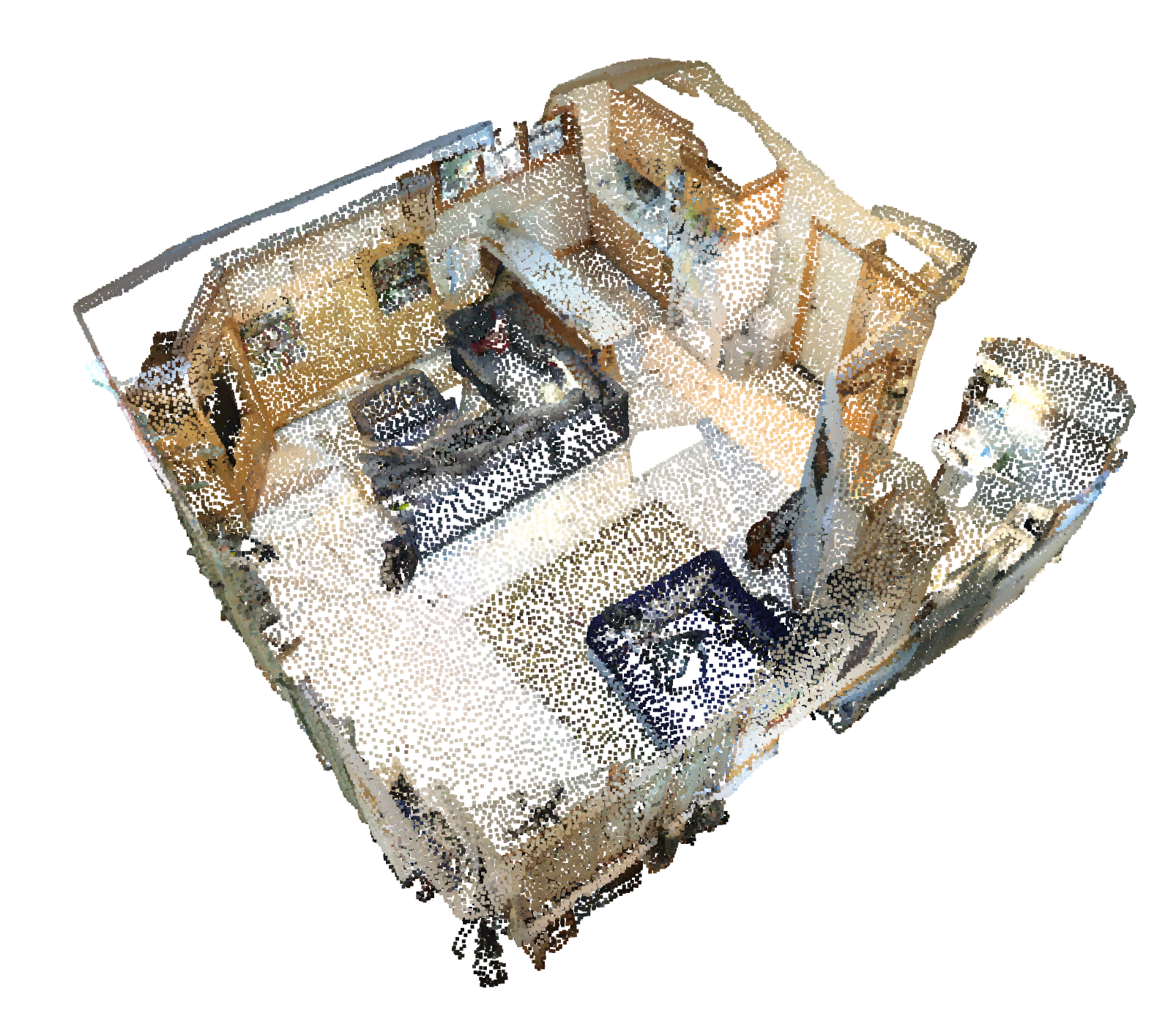

- 시각화 결과는 위와 같고, point cloud는 각 포인트의 컬러값을 표현하고
- mesh는 vertex color를 기반으로 triangle 에서 interpolation 해서 표현한다고 한다.
2. PCD (Point Cloud Data)
📍 특징
- Point Cloud Library (PCL)에서 기본적으로 사용하는 Point cloud 데이터 포맷이다.
- ASCII, 바이너리, 압축 바이너리 형식을 지원
- XYZ 좌표, RGB, 법선, 반사율 등의 정보를 저장할 수 있다.
📍 주로 사용하는 경우
- PCL을 사용할 때 (포인트 클라우드 필터링, 정렬, 분할 등)
- LiDAR 스캔 데이터 저장 및 처리
3. OBJ (+ MTL)
📍 특징
- 3D Mesh 데이터 저장에 가장 널리 쓰이는 포맷이다.
- 정점(Vertex), 면(Face), 법선(Normal), UV 맵(Texture Coordinates) 등의 정보를 저장할 수 있다.
- 텍스처(Texture) 정보는 별도의 `.mtl` (Material Library) 파일에 저장된다.
📍 주로 사용하는 경우
- 3D 모델 저장 (AR/VR, 게임, 3D 프린팅 등)
- 메시 기반 데이터 분석 (딥러닝, 렌더링 등)
mtllib f9c955b7467aea60bb17e584a89c7b57_obj0_object.mtl
v -0.41838332895 -0.100635208392 0.0562479311505
v -0.359337028451 -0.100635208392 0.0442104636768
...
vt -5.0965 1.0390
vt -0.0000 -0.0000
...
usemtl Color_003
f 1/1 2/2 3/3
f 2/2 1/1 4/4
...
| 요소 | 설명 | 디테일 | 예제 |
| v | 3D Vertex 좌표 | v x y z 형식으로, 3D 공간에서 정점(Vertex)의 좌표를 정의 | v -0.418 -0.100 0.056 |
| vt | 텍스처 좌표 | vt u v 형식으로, 3D 모델에 적용될 2D 텍스처 UV Mapping를 정의 | vt -5.0965 1.0390 |
| f | face 정의 | f a/b c/d e/f 형식으로,3D 모델의 면(Face)을 정의 a → Vertex) 인덱스 (v에서 정의한 번호) b → 텍스처 좌표 인덱스 (vt에서 정의한 번호) |
f 1/1 2/2 3/3 |
| usemtl | 사용할 머티리얼 설정 | usemtl Color_003 |
- OBJ 파일은 사람이 읽을 수 있는 형식으로 저장
- 3D 모델을 표현하기 위해 Vertex, 텍스처 좌표, Face 정보를 포함
- .mtl 파일과 함께 사용하면 머티리얼 및 텍스처 정보를 추가할 수 있다.
'📖 Fundamentals > 3D vision & Graphics' 카테고리의 다른 글
| [3D Vision] Marching Cubes: 3D 볼륨 데이터를 Mesh로 바꾸는 방법 (0) | 2025.03.24 |
|---|---|
| [3D Vision] Point Cloud vs. Mesh: 차이점, 변환 방법 (0) | 2025.03.12 |
| [CV] SFM (Structure From Motion) : 연속된 2D 이미지들로 카메라 포즈와 3D shape 재구성하기 (0) | 2022.06.05 |
| [CV] 3D Geometry 설명 (0) | 2022.04.04 |
| [Graphics] 3D 모델링을 위한 OBJ & MTL 파일 구조와 PBR 재질 정리 (0) | 2022.04.04 |